Team Lightning grabbed victory at Technocamps of 2015! After many challenges to overcome, the team successfully tackled through them to gain 1st place in the competition.
We planned and built the robot over 6 weeks - the entire team contributed to the football goalkeeper ZEUS. The main problem was fine tuning the programming, this was done by Ben. As a team we worked very well together especially because of Edward's role organising. Everyone had a fair chance in participation and we all learnt new skills in a team and by ourselves too.
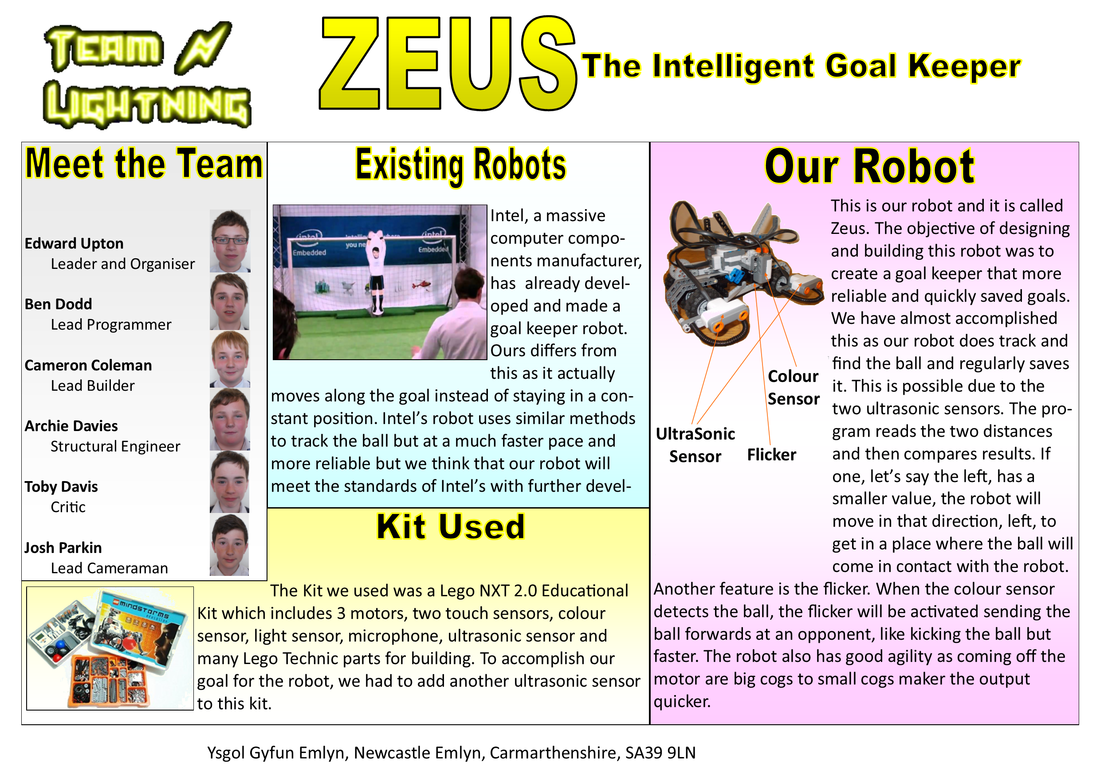
The objective of the challenge was to create a robot that would replace a human in a sport. The obvious first answer we came up with was a footballer but we wanted to be different. We kept with the sport of football however instead we planned and designed a goalkeeper.
Building it came with many problems; structure, mobility, and aesthetics were all key to make a good robot. Luckily a few of the team members had built complex designs with LEGO before so in the end the robot was very strong and looked attractive.
It works by using two ultrasonic sensors - one on the left and one on the right. If the left one could 'see' a ball closer to it than the other, then it would move to that direction, and vise versa. In the centre of the robot was a flipper mechanism which flicked the ball away from itself once it had been detected by a light sensor. For effect, we added a thunder sound and it would play on a hit.
We planned and built the robot over 6 weeks - the entire team contributed to the football goalkeeper ZEUS. The main problem was fine tuning the programming, this was done by Ben. As a team we worked very well together especially because of Edward's role organising. Everyone had a fair chance in participation and we all learnt new skills in a team and by ourselves too.
The objective of the challenge was to create a robot that would replace a human in a sport. The obvious first answer we came up with was a footballer but we wanted to be different. We kept with the sport of football however instead we planned and designed a goalkeeper.
Building it came with many problems; structure, mobility, and aesthetics were all key to make a good robot. Luckily a few of the team members had built complex designs with LEGO before so in the end the robot was very strong and looked attractive.
It works by using two ultrasonic sensors - one on the left and one on the right. If the left one could 'see' a ball closer to it than the other, then it would move to that direction, and vise versa. In the centre of the robot was a flipper mechanism which flicked the ball away from itself once it had been detected by a light sensor. For effect, we added a thunder sound and it would play on a hit.